最小生成树是图的应用之一,是无向有权图的最短路径算法。
图的应用有哪些?
最小生成树,最短路径,关键路径,拓扑排序,关键路径等。每种应用适用的场景不同,但是却很容易混淆,原因之一就是实践的太少。
最小生成树是什么?
生成树是图的极小连通子图,特点有二:
- 包括所有图中顶点,n个顶点;
- 包括尽可能少的边,n-1条边。
意味着增加一条边就会产生回路,减少一条边则非连通。
那么最小生成树就是所有生成树中,权值和最小的生成树,最小生成树的性质有三:
- 最小生成树不唯一;
- 最小生成树边的权值和是唯一的;
- 边的数量等于定点数量-1.
最小生成树的算法:Prim与Kruskal
Prim与Kruskal算法均是基于贪心的策略,两算法中均利用最小树中的性质:
假设存在带权连通无向图, $ G = (V,E) $, $U$ 标识最小生成树中的节点集,$(u,v)$ 标识一条具有最小权值的边,其中$ u\in U , v\in (V-U) $ ,那么必然存在一颗包含有边$ (u,v) $ 的最小生成树。
上面的性质乍看一下很是不好理解,但可以直接理解为一句话:当前权值最小的边一定会被选进最小生成树中。
大多数的算法均采用,加入边的方式进行设计,Prim与Kruskal也不例外。
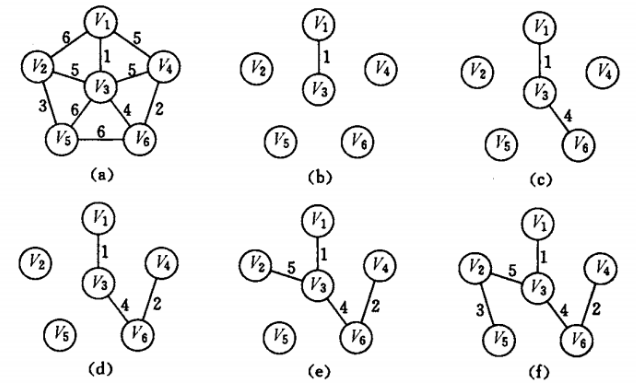
Prim算法
算法思想:从点的角度找边
假设:存在一个无向有权连通图$ G=(V,E) $ , $V_{t}$ 代表最小生成树中的节点,$V_{out} = V - V_t$ 代表未被选入最小生成树的节点,$ E_{t} $ 代表生成树边的集合。
初始$ V_t = {u_0} , E_t ={} $,重复下个步骤:
- 在所有$u\in V_t , v \in V_{out}$ 寻找最小的权值边$ e_{(u,v)}$ ,将此边加入到$E_{t}$中,节点$v$加入到$V_t$中。
直到$V_t = V$为止。
时间复杂度:$O(|V|^2)$,不依赖于边$E$ , 适合于边稠密的情况。
算法执行步骤如下图所示:
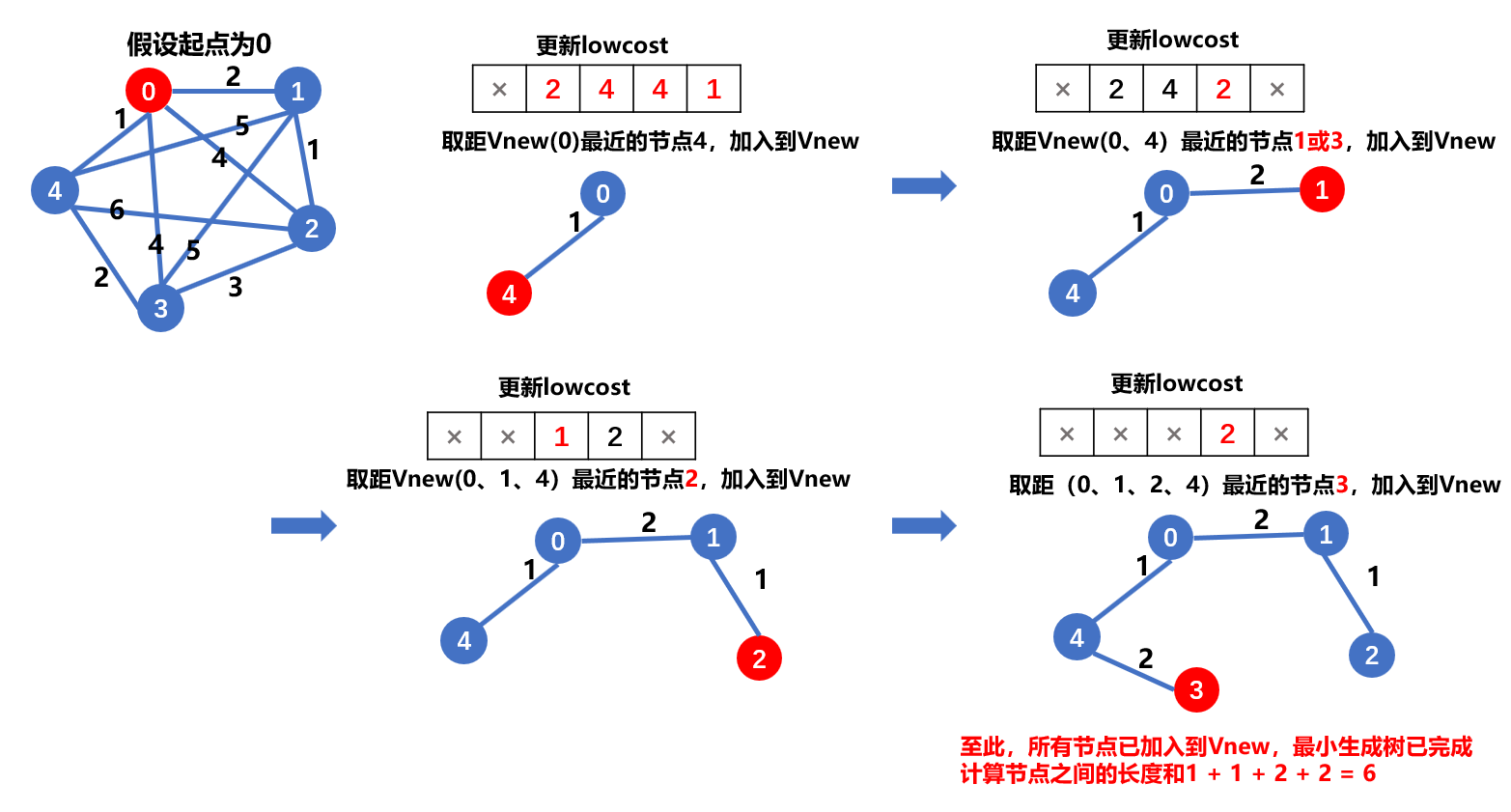
代码步骤
参考地址:牛客网友回答
通过维护两个数组:
- lowCost数组标识:$V_{t}$ 到所有节点的最小花销,如果该节点已经在$V_{t}$ 中,那么置为float(“inf”);
- VStatus数组标识:各节点的访问情况,初始化为0,若已访问则置为-1;
- 随机选择起点,加入到$V_t$中,更新lowCost与VStatus数组;
- 遍历lowCost数组,选择最小边(索引为j),将此边加入$E_{t}$,将此节点加入$V_{t}$,更新$lowCost[j]与VStatus[j]$
- 此时$V_t$ 已经发生了变化,需要更新所有的lowCost数组值;
- 重复第2步,直到所有的节点均已加入树中。
如图所示:
算法代码
以Leetcode1584题为例:
You are given an array points representing integer coordinates of some points on a 2D-plane, where points[i] = [xi, yi].
The cost of connecting two points [xi, yi] and [xj, yj] is the manhattan distance between them: |xi - xj| + |yi - yj|, where |val| denotes the absolute value of val.
Return the minimum cost to make all points connected. All points are connected if there is exactly one simple path between any two points.。
1 | # Prim算法的常规实现形式,未使用堆。 |
- 时间复杂度:$O(n^2)$,每一次在更新lowCost的复杂度均为$O(n)$.
- 空间复杂度:$O(n^2)$.
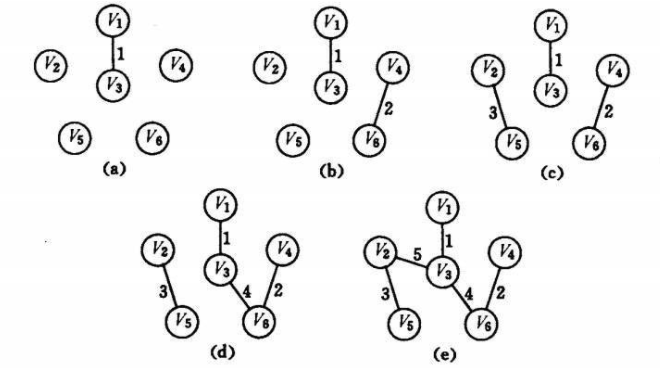
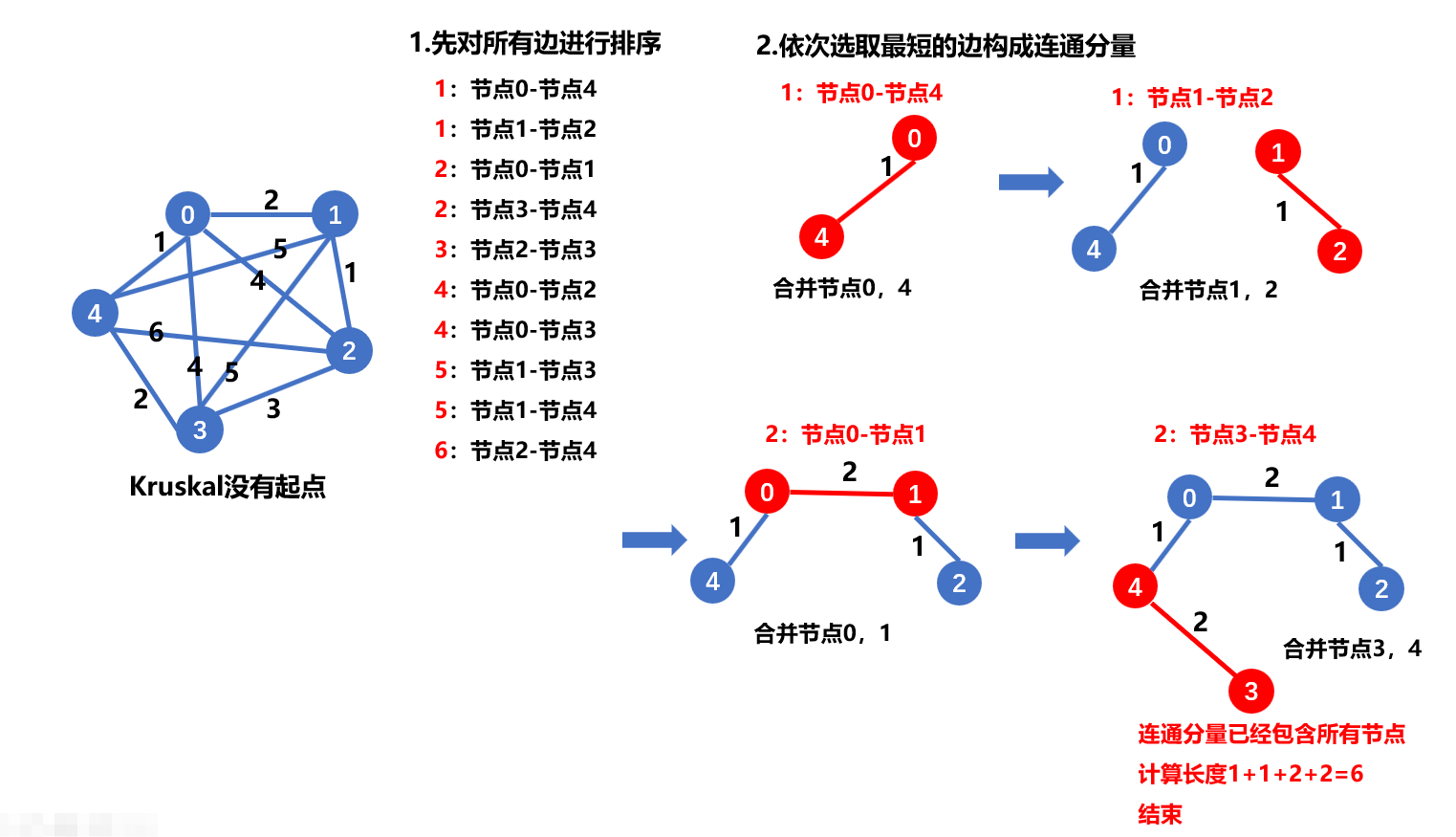
Kruskal算法
算法思想:从边的角度触发
假设:存在一个无向有权连通图$ G=(V,E) $ , $V_{t}$ 代表最小生成树中的节点,$V_{out} = V - V_t$ 代表未被选入最小生成树的节点,$ E_{t} $ 代表生成树边的集合。
初始化:$V_t = V , V_{out} = \empty , E_t = {}$,每一个顶点是一棵树,此时的最小生成树是含有N棵树的森林。重复下面的步骤:
- 按照图$ G$ 中权值递增的顺序从边$ E-E_t $ 选择边$e$ , 如果边并没有构成回路则添加进$E_t$ 中,否则舍弃此边。
直到$E_t$ 中包含有n-1条边。
- 时间复杂度:$ |E|log|E| $,适合变稀疏的情况。
算法执行步骤如下图所示:
代码步骤
利用并查集,很容易解决此类问题。并查集的定义与模板代码,可以看我的解释。
- 构建一个带有并查集的类,并实现相关功能;
- 计算所有的边长,并记录顶点信息,存储在数组$E$ 中,按照边长排序;
- 初始化并查集(将所有的顶点加入到并查集中);
- 遍历$E$,假设每一个边由$e = [len , i , j]$ 组成:
- 如果顶点$i,j$ 属于同一个集合,那么舍弃;
- 否则进行集合合并操作,并累积output
- 返回output
算法代码
1 | # 同样以1584题为例 |
- 时间复杂度:$O(mlog(m) + m\alpha(m))$,m为索引对的数量
- 空间复杂度:$O(n^2)$